前言 随着预训练语言模型的快速发展,很多问题可以通过堆数据和堆模型参数简单粗暴的有效解决。所以亲自训练一个大模型一定是每个NLPer都想尝试的事,这时候就需要进行多机多卡的分布式训练了。本文是一篇踩坑后的总结,介绍如何基于huggingface的transformers库来快速实现。
注意本文仅涉及数据并行,而不涉及模型并行。所以参考本文可以自己从零训练一个bert,bert-large等,但想训练万亿参数的超大模型(一张显卡都不能存储模型的参数)就需要更复杂的实现了。
基本概念
node_rank: 节点的编号
rank: 全局进程的编号
local_rank: 单个节点上进程的编号
word_size: 全局总进程的数量
master ip: master进程的ip地址
master port: master进程的端口
一般rank编号为0的进程会作为master进程
具体举个例子:当前有2个节点,每个节点有8块GPU卡,然后启动多机多卡的分布式训练用满这16块卡,这时候:
node_rank: [0,1]
rank: [0,1,2,3,4,…,15]
loacal_rank: 节点1上[0,1,2,..,7], 节点2上[0,1,2,..,7]
word_size: 16
如果通过python -m torch.distributed.launch的方式启动,部分参数都会自动注入到环境变量中,可以在脚本中进行获取。例如:
rank = int (os.environ.get('RANK' ))int (os.environ.get('LOCAL_RANK' ))int (os.environ.get('WORLD_SIZE' ))
IterableDataset 训练大模型一定是基于大数据,可能非常大(例如上百GB),所以不能采用map-style的dataset作为训练集的dataset,因为无法直接load到内存中,所以需要采用IterableDataset。同时为了训练的数据较快,需要采用多进程的数据加载,即num_worker>0。
这时候假设在一个2个节点,每个节点8张卡的分布式环境中,同时采用10个子进程进行数据加载。2 * 8 * 10 = 160
在IterableDataset如果直接按照最简单的写法,如下所示:
1 2 3 4 5 6 7 8 9 10 11 class CustomIterableDataset (IterableDataset ):def __init__ (self, data_file ):def __iter__ (self ):while True :with open (self.data_file, 'rt' , encoding='utf-8' ) as f:for line in f:f"系统进程号{os.getpid()} , 加载的数据{line.strip()} " )yield line.strip()
通过日志打印可以发现,同一份数据将被160个进程重复加载,这显然就不是数据并行了。
所以迭代阶段就需要进行精细的处理,避免一份数据被多个进程重复加载。参考Pytorch官方的文档,可以发现实际上是预计算出每个子进程需要迭代的区间,然后结合子进程的信息找到对应的区间进行迭代。
https://pytorch.org/docs/stable/data.html#torch.utils.data.IterableDataset
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 class MyIterableDataset (torch.utils.data.IterableDataset ):def __init__ (self, start, end ):super (MyIterableDataset).__init__()assert end > start, "this example code only works with end >= start" def __iter__ (self ):if worker_info is None : else : int (math.ceil((self.end - self.start) / float (worker_info.num_workers)))id min (iter_start + per_worker, self.end)return iter (range (iter_start, iter_end))3 , end=7 )list (torch.utils.data.DataLoader(ds, num_workers=0 )))list (torch.utils.data.DataLoader(ds, num_workers=2 )))list (torch.utils.data.DataLoader(ds, num_workers=20 )))
但是这里只处理了单块GPU卡多子进程加载数据的写法,我们这里是分布式的多机多卡,所以还需要对以上代码进行改造,进一步引入rank的信息。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 class CustomIterableDataset (IterableDataset ):def __init__ (self, data_file, num_lines ):0 int (os.environ.get('WORLD_SIZE' ))int (os.environ.get('RANK' ))def __iter__ (self ):int (math.ceil((self.end - self.start) / total_data_loader_count))id ) * per_worker_lineswhile True :with open (self.data_file, 'rt' , encoding='utf-8' ) as f:for _ in range (iter_start):f"系统进程号:{os.getpid()} rank编号:{} dataloader子进程编号:{worker_info.id } , 开始加载数据" )for _ in range (per_worker_lines):f"系统进程号{os.getpid()} , 加载的数据{line.strip()} " )yield linesum (1 for line in open ('big_file.txt' )'big_file.txt' , train_file_lines)
通过以上处理后,可以观察到160个进程每个进程加载的数据都是不一样的。
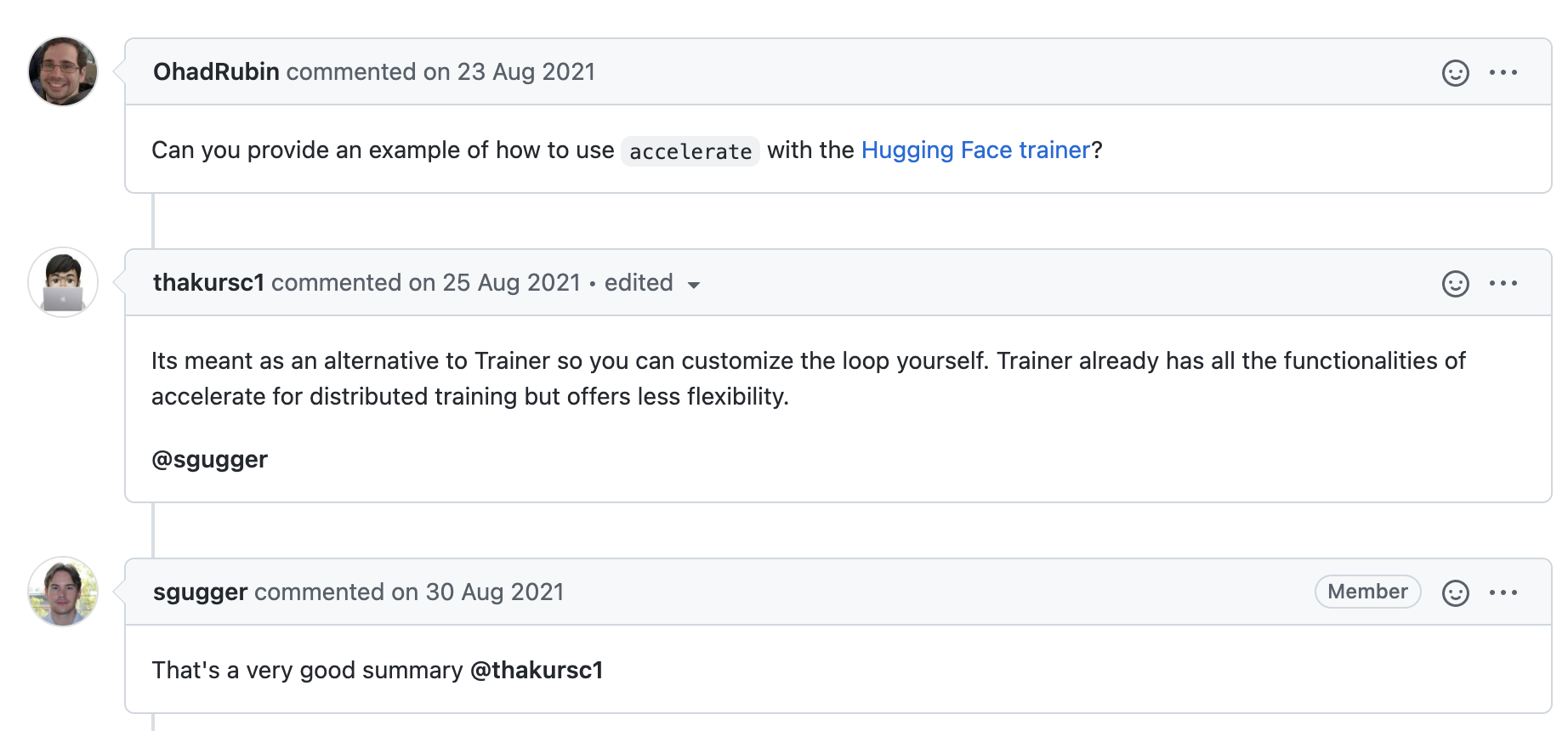
Trainer is ALL YOU NEED 如果采用原生的torch.distributed.launch进行多机多卡的训练是需要写很多范式代码的,例如init_process_group。而采用transformers的Trainer会自动 帮你去适配你当前的环境,也就是无论是单机单卡,还是单机多卡,还是多机多卡都是一份代码,并且对于fp16这种配置也就是一个参数项。最近发现Trainer实现分布式训练的底层逻辑其实已经进一步抽象成了一个新的库huggingface/accelerate 。
贴一段这个库的描述:🚀 A simple way to train and use PyTorch models with multi-GPU, TPU, mixed-precision
再贴一段这个库与transformers的trainer的关系:https://github.com/huggingface/accelerate/issues/144
所以直接使用Trainer就好了!! 下面是一段示例代码:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 sum (1 for line in open (args.train_data_file)int (os.environ.get('WORLD_SIZE' ))True ,True ,"steps" ,True ,1 ,int (os.environ.get('LOCAL_RANK' , -1 )),'eval_loss' ,True ,10 ,
train.sh
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 # 单机单卡-train_data_file $DATA_DRT /train.txt \ --eval_data_file $DATA_DRT /dev.txt \ --learning_rate 5e-5 \ --train_batch_size 128 \ --eval_batch_size 128 \ --eval_steps 1000 \ --num_train_epochs 10 python -m torch.distributed.launch \ --nproc_per_node=8 \ train.py \ --train_data_file $DATA_DRT /train.txt \ --eval_data_file $DATA_DRT /dev.txt \ --learning_rate 5e-5 \ --train_batch_size 128 \ --eval_batch_size 128 \ --eval_steps 1000 \ --num_train_epochs 10 python -m torch.distributed.launch \ --nproc_per_node=8 \ --use_env \ --node_rank $NODE_RANK \ --master_addr $MASTER_ADDR \ --master_port $MASTER_PORT \ --train_data_file $DATA_DRT /train.txt \ --eval_data_file $DATA_DRT /dev.txt \ --learning_rate 5e-5 \ --train_batch_size 128 \ --eval_batch_size 128 \ --eval_steps 1000 \ --num_train_epochs 10
其他tips